
官网对外发布《创新医疗器械特别审查申请审查结果公示(2023年第8号)》,拟同意6款项目进入特别审查程序。

该款产品是来自深圳市罗伯医疗科技有限公司(简称“ROBO医疗”)的消化内镜手术机器人(EndoFaster),就在今年9月公司刚刚宣布,这一产品完成了用于中国注册的前瞻性、多中心、平行对照临床试验的全部入组。
据公司介绍,EndoFaster消化内镜手术机器人系统是全球领先的经自然腔道手术机器人之一,也是全球首个完体注册临床试验的消化内镜手术辅助操作系统。
内镜粘膜下剥离术(EndoscopiSubmucosal Dissection,ESD)是针对消化道癌症早期治疗的行之有效的微创手术方法。其可以应用于消化道早期肿瘤的内镜下切除,因完整切除率高、安全性好,现已成为消化道早癌治疗的首选治疗方案。
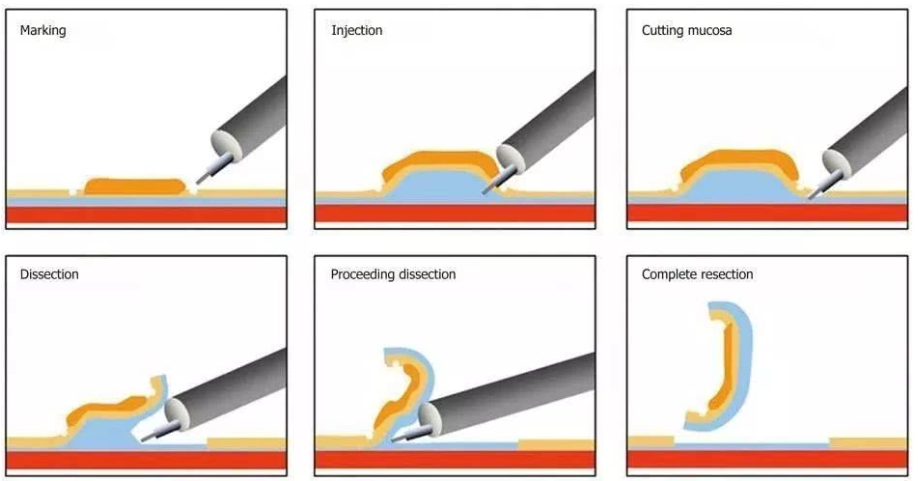
然而传统ESD手术操作难度大、手术学习曲线长,受限于消化内镜的结构,医生无法在完成病变组织剥离的同时对组织进行有效的牵引。这就导致了ESD手术严重依赖医生的个人技术,很大程度上阻碍了该手术的推广和普及。
ROBO医疗消化内镜手术辅助操作系统采用了创新的微型连续体柔性机械臂设计,这一方案为消化内镜下手术操作带来了全新的突破。通过用机械臂的运动实现对内镜黏膜下剥离术(ESD)中病变组织的牵引与提拉,让手术操作更接近医生的直觉,进而实现缩短手术时间、降低术中并发症发生概率。
该系统的柔性臂直径可以控制在3mm左右,同时在消化道的有限空间内实现了4自由度的精准主从控制。这项技术创新大大提高了ESD的安全性,降低了该手术的学习难度,为该术式的普及推广提供了手术机器人的解决方案。
据公司介绍,ROBO医疗是消化领域手术机器人的先行者,一直致力于柔性消化内镜手术机器人的技术攻关,也是目前该赛道全球最早进入产业化阶段的手术机器人公司,与美国同行一起处于领跑位置。
ROBO起源于欧盟委员会和中国科技部的手术机器人专项研究项目,由来自欧洲、中国、美国的机器人技术专家携手共同参与,推动了ROBO医疗的成立。2013年,ROBO医疗初创于瑞士;2014年,ROBO医疗在美国硅谷发展, 创办ROBO Medical(US) ;2015年,ROBO医疗在华大基因(BGI)创始人汪建先生指引下, 扎根中国深圳,成立深圳罗伯医疗科技有限公司。2016年,ROBO医疗机器人研究所(深圳)正式成立,由孙立宁教授担任所长。
2017年开始,ROBO医疗携手山东大学齐鲁医院合作开发消化内镜手术机器人,并承接了“科技部重点研发计划消化内镜微创手术机器人关键技术及系统”,致力于将手术机器人技术应用到消化领域,该系统获得国内外众多专家普遍认可。
今年6月,ROBO医疗完成由泰琨基金领投的数千万元的A轮融资,而该轮融资所募集资金将用于FASTER消化内镜手术机器人产品的临床试验、市场推广和后续研发工作。
公司官网显示,目前公司的产品还包括下肢康复运动训练器以及在研中的多通道消化内镜手术机器人系统。
随着技术的进步,当前消化内镜手术机器人产品正快速涌现,出现了美国的Medrobotics、EndoTheia、中国的ROBO医疗、巧捷力、视通医疗等一大批企业布局。
Medrobotics开发的 Flex机器人系统是一种高度铰接、多链接的“蛇形”机器人,使外科医生能够用最少的适用于解剖学难以触及的区域的侵入性手术。
Flex机器人系统是世界上第一个具有可操纵和可成型机器人范围的腔内机器人平台。2017年5月FDA获批,可以经肛进行局部切除术和TaTME(全直肠系膜切除术)。2014年获得了欧洲CE认证。
该系统操作方便,且其活动不受末端壳的限制,灵活度更高。但仍需要使用特制直肠端口进行适当密封,以维持充气,且机器人内窥镜的工作长度相对较短,仅允许切除距离边缘25cm及以内的病变。
今年1月美国公司EndoTheia宣布其产品EndoTheia Robot获得FDA授予的“突破性设备”称号,FDA给出理由是EndoTheia Robot的技术大大改进了微创柔性内窥镜手术。本次“突破性设备”认证范围为耳鼻喉(ENT)领域。
目前EndoTheia Robot已经在动物、尸体和组织模型研究中证明了技术可行性。其中已经开展例如输尿管镜下取石手术、内镜黏膜下剥离术(ESD)、鼻窦手术和中耳手术等等。EndoTheia Robot可以在任何软镜手术中提供灵活性,包括泌尿外科、神经学、呼吸内科、消化内科、骨科、耳鼻喉科(ENT)等。
巧捷力医疗机器人是一家由香港大学孵化的医疗科技公司,其研发的全球首个全柔性内镜手术机器人,能兼容医院现有内镜设备,为医生提供更灵活更精准的内镜手术操作。该机器人系统未来能应用于不同部位,包括胃、结直肠、膀胱、呼吸道、食道等自然腔道。
巧捷力医疗手术机器人的机械臂系统,是针对内窥镜诊疗手术研发的手术机器人系统,该系统由柔性手术机械臂、控制主机以及医生操作椅三部分组成,其柔性机械臂最小直径可少于2.8 mm,并负载夹起肿瘤组织,成功整体切除。
此前企业已于香港相继完成尸体测试及二代样机动物测试。接下来,巧捷力还计划在今年提交产品型检并进行下一轮测试,争取于2024年开展首次试验(first-in-human trial, FIH)。
2023年11月消息,近日苏州视通医疗科技有限公司(以下简称“视通医疗”)在上海某知名三甲医院消化科专家的指导下,完成内镜黏膜下剥离术(Endoscopic Submucosal Dissection,ESD)的动物实验。各项指标的测试结果均达到预期目标,充分验证了视通医疗柔性消化手术机器人系统的精准性、安全性和有效性。
视通消化机器人主控制臂采用七自由度冗余结构,可达空间约400mm*300mm*300mm,具有力反馈功能,为医生提供更灵活、更大范围、更精细的操控体验。系统操作界面智能化,操作反馈直观,医生可以轻松完成传统内镜手术中难以实现的任务,如提拉、牵引、推升、切口闭合以及全层缝合等。
—— 在我国的肿瘤患者中,消化道癌有“患病率高、发病率高、死亡率高”的特点。胃癌、食管癌和结直肠癌每年新发病例约150万,死亡病例约100万。我国胃癌新发病例和死亡病例约占全球42.6% 和45%。
内镜粘膜下剥离术(Endoscopic Submucosal Dissection,ESD)可以应用于消化道早期肿瘤的内镜下切除,扩大了内镜下切除的适应症,创伤小,体表无手术切口,术后恢复快。
遗憾的是,2020年全国消化内镜普查的数据显示,我国共有消化内镜医师39639名,占全国执业医师的1.03%,国内每百万人拥有消化内镜医师的数量不及日本等发达国家的十分之一,缺口较大。
同时在传统ESD手术中,存在单器械操作,手术耗时长,易出现并发症,如穿孔等现象;同时,传统手术对医师技术要求高,限制了ESD手术在基层医疗中的推广。
而越来越多消化内镜手术机器人产品的涌现,能够大幅提升ESD手术操作的精确度与稳定性,降低操作难度,改善学习曲线,提高手术质量,引领微创内镜手术技术的变革。那么,在众多产品当中,究竟哪一家能够脱颖而出,实现突围?我们将持续关注。
备案号:沪ICP备10015141号-1 杏彩体育·(中国)官方网站欢迎来电咨询!

