
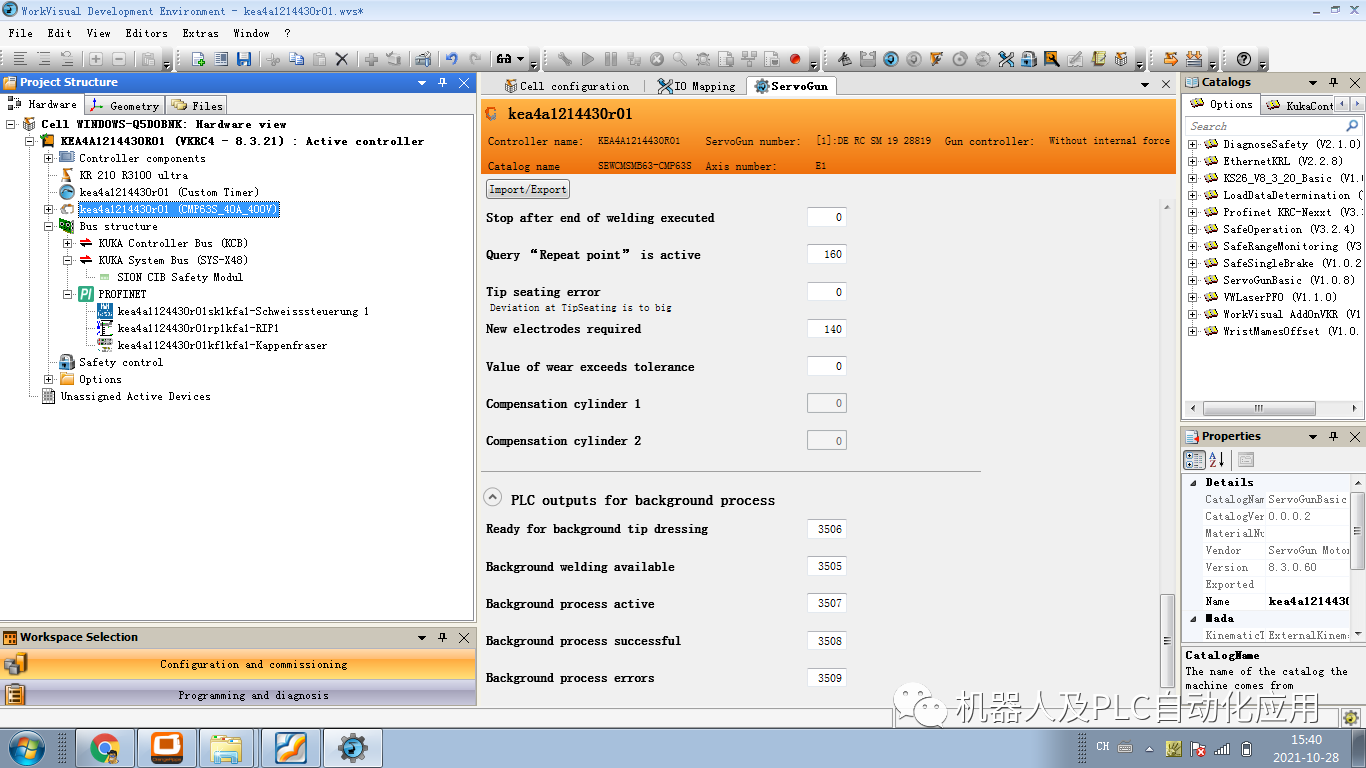
SERVOZANGE (伺服钳):选择焊钳--在列表中只显示已激活选项 后台流程已激活 的焊钳。
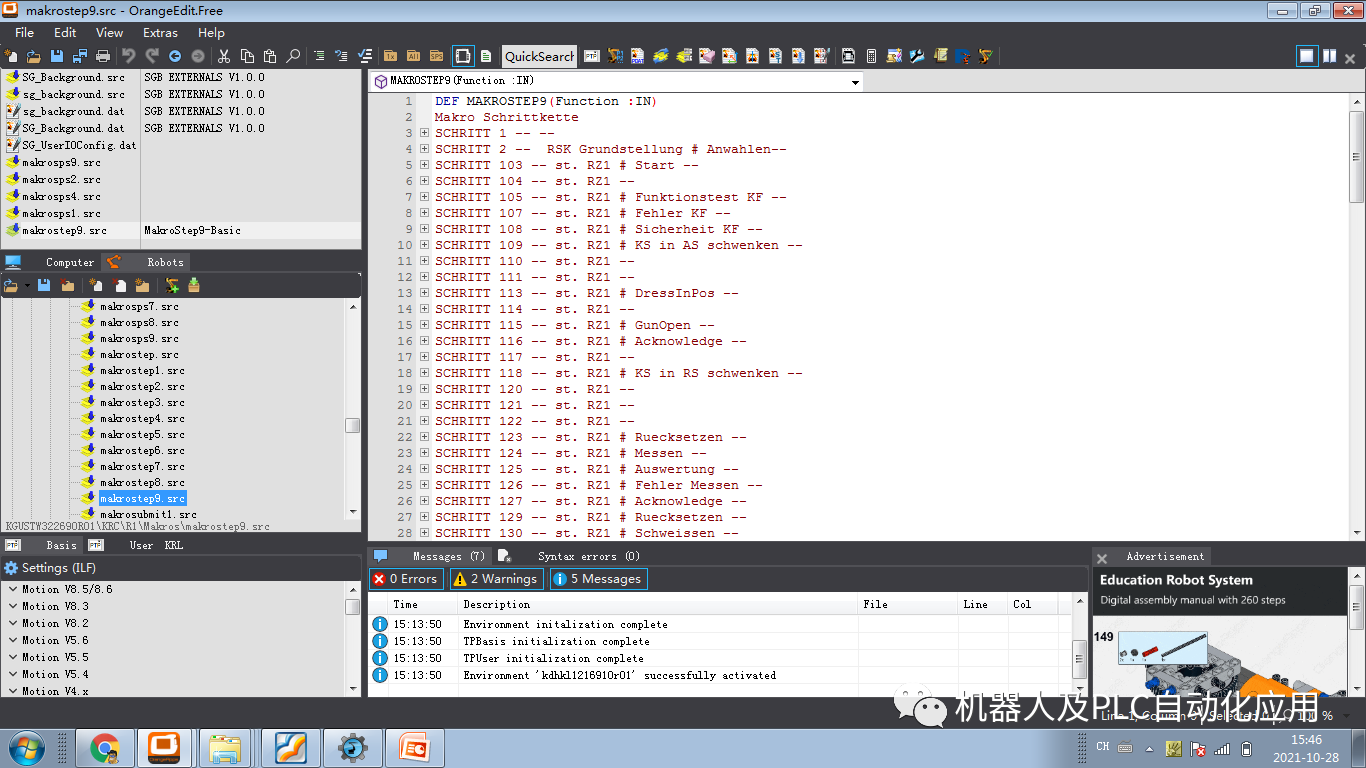
Synchron (同步):请等待,直到可能已启动的后台流程已结束,然后锁闭后台流程。然后,固定焊钳在铣削/焊接时不再可进行异步运动。
这是因为机器人轴和附加轴(=焊钳)为同步运行。这意味着它们会执行同样的动作,同时开始同时结束。修磨过程中机器人轴在一般情况下虽然保持静止,但是仍属于总运动的一部分。
通过后台命令可以使固定焊钳进行异步运动。此时机器人轴可独立于焊钳进行另外的运动。不仅在修磨时可进行异步的焊钳运动,焊接时也同样可以。但这仅适用于无实际工件的测试焊接(例如在检查阻力时)。
• 行指令 Asynchron (异步)开通所选后台进程,即允许执行进程。异步打开附加轴(= 焊钳)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

的要求,例如扭矩和速度范围。传感器的选择则取决于需要监测的参数,如位置、速度和力量。 2. 编写适当的
的设计与实现方法,根据工作现场的实际需求,对离线码垛过程进行了研究,通过码垛关键参数的输入和码垛空间判断,建立离线编程的基础,给出硬件
的结构采用空间开链接结构,其各个关节的运动是独立的,为了实现末端点的运动轨迹,需要多关节的运动协调。所以,其
和步态管理,采用了个人数字助理(PDA)和数字信号处理器(DSP)组合,并以Windows Mobile作为软件平台。具体分析了
所需的主控单元、电机驱动单元、传感检测单元及LCD显示单元,其中详细分析了以MCBL3006S为核心的伺服电机驱动单元,以及关系比赛
器PMAC(Programmable Multi-Axis Controller)的开放式
备案号:沪ICP备10015141号-1 杏彩体育·(中国)官方网站欢迎来电咨询!

