
如果在子程序中导致空转,则只在该子程序中执行空转运行。空转运行并不涉及调用该子程序的那个程序。
在这些情况下,将数字、二进制和模拟的输出端、存储器和旗标均置为 FALSE。此后机器人移至轨道上下一个程序编定的位置。到达该位置时将进行空转。之前重置的信号将被相应赋值,就好象程序结束运行时已到达此位置。程序运行可继续进行。
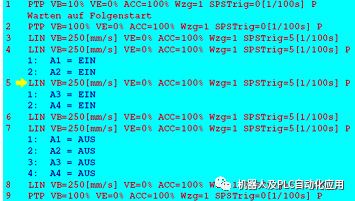
例如程序运行会由于行 5 处的语句选择而在行 6 处被中断。在行 6 处输出端 A1... A4 为 TRUE。这些输出端现在被置为 FALSE。随着 SAK 移动将缓慢地直接驶至所选择的运动语句。到达行 5 时机器人将停止,并执行空转,且输出端 A1 和 A2 将重新被置为 TRUE。程序运行可继续进行。
点击启动反向运行键,所有输出端、标记器和旗标均被赋值为 FALSE。将按程序编定的轨道反向运行。此时将不考虑逻辑指令及子程序调用。如果通过按下启动正向运行键重新改变方向,则将执行空转运行。
离开轨道时,将只有数字和模拟输出端被重置。二进制输出端、标记器和旗标的状态均不更改。通过启动键可将机器人重置回它离开轨道的位置处。空转之后数字和模拟输出端将被置为离开轨道之前的状态。
备案号:沪ICP备10015141号-1 杏彩体育·(中国)官方网站欢迎来电咨询!

